The operating system has stable compatibility, and there will be no incompatibility with specific dependencies due to the update of the Raspberry Pi system. The parameter direction is used to select the control direction, which can be: + or -. We provide a variety of control methods for RaspArm-S. You can not only use Web applications to control RaspArm-Son your mobile phone, but remotely control RaspArm-Son another computer. 1. You can unplug the card reader from the computer and then plug it into the computer again.It is necessary to configure SSH and WIFI connection later. Find the ".ZIP" file you just downloaded, and extract it. lMany servos are used in this robot. (1) We first enter the driver D of the computer, click "View" in the upper left corner, and select "File Extension", as shown below: (2) Right-click on the blank space of the D drive, select "New", and select "Text Document". In the subsequent operations and the process of using the Raspberry Pi, you can control the Raspberry Pi through another machine in the same local area network without connecting the mouse, keyboard and monitor to the Raspberry Pi. With this new structure, you can use it for some creations, such as drawing. 14.2 How to control a robotic arm in the form of a writing pen.
Select the Raspberry Pi OS (Legacy) with desktop version, which contains a complete desktop system and recommended software packages. (2) Download the Portable edition of MobaXterm Home Edition (current version): (3) Find the downloaded file MobaXterm_Portable_v20.2.zip, double-click to open it, extract it to get a new file. Controlling the chuck of the robotic arm. I am calling the python codes provided by adeept from MATLAB and trying to run it, it showing some errors. 3. In the writing pen mode, Rudder D will try its best to automatically maintain the aluminum alloy parts that connects to it and maintain an angle with the ground. Each servo must be adjusted to the middle position(90). 2. Therefore, the assembly of servos has great impact on its performance. is equipped with an OLED screen to display key information. If you want to adjust the angle of the rocker arm, please remove it from the servo, find a proper angle and insert again. After that, every time you start the Raspberry Pi, it will automatically start SSH without repeating the above operations. As an open source hardware product, we pay special attention to the secondary development potential of RaspArm-S. We also provide detailed API calling methods. (1) Create a new file named wpa_supplicant.conf in the root directory of the D driver of the computer. For example, if we want to hold something, we only need to consider where we should put our hands.
This course uses Raspbian as the preferred OS for the Raspberry Pi. 1.6 Remotely logging in to the Raspberry Pi system, 1.6.1Download and install MobaXterm software. Dedicated to applying the Internet and the latest industrial technology in open source area, we strive to provide best hardware support and software service for general makers and electronic enthusiasts around the world. It is necessary for you to record this IP address for it is needed to log in to the Raspberry Pi system later. After 2016, Raspbian distributions disable the SSH service by default, so we need to manually enable it. Connect the HDMI cable to the HDMI port of the monitor: Turn on the monitor switch, and connect the mouse to the USB port of the Raspberry Pi, supply power to the Raspberry Pi with the Type-C data cable, then the Raspberry Pi starts. 1. 3. 4. Why does KLM offer this specific combination of flights (GRU -> AMS -> POZ) just on one day when there's a time change?
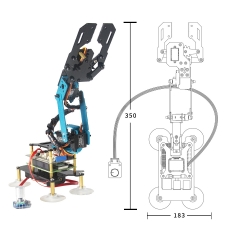
There are drawings of the robotic arm in our document, including dimensions and assembly hole specifications, which is convenient for users to use the robotic arm in more occasions.The robotic arm itself is also a modular design, so users can flexibly assemble it into the form they need. 3. (This image file will not change and has been tested in detail and successfully). Adeept is a technical service team of open source software and hardware. No extra battery is required. 2. At Oz Robotics, we help you buy the latest technologies affordably while supporting businesses to sell their products globally. 4. The specific assembly steps are in "10.3 RaspArm-SWriting Pen Robotic Arm Assembly Tutorial" in Lesson 10. First, you need to create a new .py file in the same folder as raspArmS.py, then you can write code programs to realize your own creativity in this newly created .py folder.
But when I am running the same codes in pc via MATLAB its not working. This function will not block the program, and the robot arm will start to move after the call is completed. When the parameter command is "loose", the mechanical arm chuck is released. [x, y, z] is the coordinate point of the Cartesian coordinate system where the end point is located. You can refer to Lesson 11. "Country" is your country code, do not modify it, the default is US; "ssid" needs to be changed to the name of the WIFI you want to connect; "psk" needs to bechanged to the password of the WIFI you want to connect; other parts do not need to do any modifications. Next, we will teach you how to download the Raspberry Pi OS Raspbian. Copy the ssh file to the Raspberry Pi as shown below: 1.5Setting up Raspberry Pi WIFI wireless connection. . It is stable, powerful, and easy to use. Raspberry Pi Imager is a new image burning tool launched by the Raspberry Pi Foundation. Are shrivelled chilis safe to eat and process into chili flakes? By using our website, you signify that you agree to be bound by our policies. RaspArm-Sis equipped with an OLED screen to display key information. How should I deal with coworkers not respecting my blocking off time in my calendar for work? Lesson 1 Installing and Logging in to the Raspberry Pi System, Lesson 3 Creating a WiFi Hotspot on Raspberry Pi, Lesson 4 Downloading and Installing Python, Lesson 5 Displaying Text on the OLED Screen, Lesson 6 Playing Animation on the OLED Screen, Lesson 9 Multithreading OLED Screen Control, Lesson 11 Remotely Control of Robotic Arm with GUI, Lesson 12 Controlling the Robotic Arm with Raspberry Pi Peripherals, Lesson 13 Controlling the Robotic Arm with a Web Application, Lesson 14 Replacing the Arm Clip with a Writing Pen, Lesson 16 Mounting the RaspArm-S Robotic Arm to Other Robots, Lesson 17 Using Multithreading to Control the Servo of RaspArm-S, Lesson 18 Introduction to the Soft Motion Method of the Servo, Lesson 19 Inverse Solution Function of Plane Link, Lesson 21 Simulating a Plane Link with Matplotlib, Lesson 22 Matplotlib Dual-view Linkage Simulation, Lesson 24 Using json Data to Record and Repeat Actions, Lesson 26 Using a Rotary Encoder to Control a Robotic Arm. SF novel featuring a quest, very flexible roads, and giant letters floating out of mountains. to jump to the corresponding location, or you can find the location of Raspberry Pi OS (Legacy) by sliding the page.
We also provide detailed API calling methods. Sets with both additive and multiplicative gaps, How to help player quickly make a decision when they have no way of knowing which option is best. Making statements based on opinion; back them up with references or personal experience. (3) Find the ".img" file of the Raspberry Pi system that we downloaded and decompressed before. Asking for help, clarification, or responding to other answers. Find line 257, modify gripper to pen, and save the modified file.
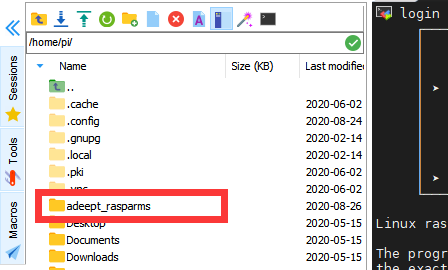
RaspArm-Sis an open source robotic arm product which is based on the Raspberry Pi. How can recreate this bubble wrap effect on my photos? Now there are two ways to download Raspbian for Raspberry Pi OS (we recommend Method One). It is stable, powerful, and easy to use. Controlling the robotic arm to slowly move to a new position. What would the ancient Romans have called Hercules' Club? The parameter planList is an array composed of each target point position, for example: [[90, 140, 0, 90], [-90, 140, 0, 0], [0, 140, 90, 0]], Controllingthe simple movement of the robotic arm. (2) One HDMI cable: used to connect the monitor. It is necessary for you to record this IP address for it is needed to log in to the Raspberry Pi system later. After an axis starts moving, this function needs to be called to stop the axis. It may cause an error when the Raspberry Pi runs the program. 465), Design patterns for asynchronous API communication. By clicking Post Your Answer, you agree to our terms of service, privacy policy and cookie policy. This control method only needs to input the position of the end point to control the execution of the robotic arm. Click "Download", download the ".ZIP" file, and wait for the download to complete: (remember where the file is saved). Do not rotate the servo shaft before the installation of the servo is completed, and change the initial angle of the servo. After entering the Raspberry Pi official website page, click ". " (1) Open the softwareon the desktop, as shown below: (2) Click "Session" in the upper left corner. (1)Log in to the official website through a browser to download: https://mobaxterm.mobatek.net/download.html. (8) Click "WRITE" to write it to the SD card. It is customized based on Debian GNU/Linux and can run on all versions of the Raspberry Pi motherboard. It can be: X, Y, and Z. file you just downloaded, and extract it. In this lesson, we will learn how to install and remotely log in to the Raspberry Pi system under Windows. It can basically meet the needs of various applications. After the Raspberry Pi Imager is burned, the memory card will be ejected in the program. 1. The advantages of permanent power and simple structure enable you to focus on product development without any worries and realize your creative ideas more efficiently. After the download is successful, extract the ZIP file and get a ".img" file. United States of America, sales@ozrobotics.com 2. As shown below: (5) Copy this ssh file to the root directory of the SD card of the Raspberry Pi system. Run the program initPosServos.py: sudo python3 adeept_rasparms/initPosServos.py. Enter in the Raspberry Pi command line: Lesson 1 Installing and Logging in to the Raspberry Pi System, Lesson 2 Downloading and Installing the Relevant Code Program of the Robot, Lesson 3 Creating a WiFi Hotspot on Raspberry Pi, Lesson 4 Downloading and Installing Python, Lesson 5 Displaying Text on the OLED Screen, Lesson 6 Playing Animation on the OLED Screen, Lesson 11 Remotely Control of Robotic Arm with GUI, Lesson 12 Controlling the Robotic Arm with Raspberry Pi Peripherals, Lesson 13 Controlling the Robotic Arm with a Web Application, Lesson 14 Replacing the Arm Clip with a Writing Pen, Lesson 16 Mounting the RaspArm-S Robotic Arm to Other Robots, Lesson 17 Using Multithreading to Control the Servo of RaspArm-S, Lesson 18 Introduction to the Soft Motion Method of the Servo, Lesson 19 Inverse Solution Function of Plane Link, Lesson 21 Simulating a Plane Link with Matplotlib, Lesson 22 Matplotlib Dual-view Linkage Simulation, Lesson 24 Using json Data to Record and Repeat Actions, Lesson 26 Using a Rotary Encoder to Control a Robotic Arm. 4. This will cause the subsequent copy operation to prompt that the SD card has not been found. The code described below is written in the newly created .py file. Before assembling the servo rocker arm, it's recommended to power on the servo and control the servo shaft to rotate to the central position, so then the rocker arm installed at a specific angle will be in the center position(90). Don't remove the SD card after burning! 4. This completes the setting. when I am trying to run python code directly then also I am getting this error. Now there are two ways to download Raspbian for Raspberry Pi OS (, Raspberry Pi officially provides a Raspberry Pi OS -. As shown below: (6) Now we can take out the SD card and put it into the "MICRO SD CARD" card slot on the Raspberry Pi development board, and use the Type-C data cable to supply power to the Raspberry Pi. For details, please refer to "Lesson 10RaspArm-SAssembly Tutorial". (5) Enter the default account of Raspberry Pi: pi, then press Enter, and then enter the default password of Raspberry Pi: raspberry. 2. If you want to build your own project, you can directly call the existing API to control. Most of the functions related to robotic arm control are encapsulated in raspArmS.py. Regarding the control of RaspArm-S, we use the inverse connection method to control the servo, which is different from the control method that depends on inputting the angle of the servo. I have a rasparm robot by adeept it has a power electronics unit provided by the company and it is connected to raspberry pi3b+.
 I want to use adafruit_pca9865 library and call it with MATLAB and deploy the code to raspberry to make it running. The usage instructions of the API function raspArmS.py are explained in detail in Lesson 15. Artworks, brands, logos, banners, and contents are the property of their respective owners. The function of the end servo will change from controlling the gripper to keeping the pen at a certain angle. This method only needs to be used once.
I want to use adafruit_pca9865 library and call it with MATLAB and deploy the code to raspberry to make it running. The usage instructions of the API function raspArmS.py are explained in detail in Lesson 15. Artworks, brands, logos, banners, and contents are the property of their respective owners. The function of the end servo will change from controlling the gripper to keeping the pen at a certain angle. This method only needs to be used once. The y value is the position of the end point relative to the front and back of the robot arm: if the y value becomes larger, the end point position will shift forward; if the y value becomes smaller, the end point position will shift backward. For example, if we want to hold something, we only need to consider where we should put our hands. Lesson 9 Multithreading OLED Screen Control. Its usage is similar to Etcher and win32diskimager. Lesson 1 Installing and Logging in to the Raspberry Pi System, Lesson 2 Downloading and Installing the Relevant Code Program of the Robot, Lesson 3 Creating a WiFi Hotspot on Raspberry Pi, Lesson 4 Downloading and Installing Python, Lesson 5 Displaying Text on the OLED Screen, Lesson 6 Playing Animation on the OLED Screen, Lesson 9 Multithreading OLED Screen Control, Lesson 11 Remotely Control of Robotic Arm with GUI, Lesson 12 Controlling the Robotic Arm with Raspberry Pi Peripherals, Lesson 13 Controlling the Robotic Arm with a Web Application, Lesson 14 Replacing the Arm Clip with a Writing Pen, Lesson 16 Mounting the RaspArm-S Robotic Arm to Other Robots, Lesson 17 Using Multithreading to Control the Servo of RaspArm-S, Lesson 18 Introduction to the Soft Motion Method of the Servo, Lesson 19 Inverse Solution Function of Plane Link, Lesson 21 Simulating a Plane Link with Matplotlib, Lesson 22 Matplotlib Dual-view Linkage Simulation, Lesson 24 Using json Data to Record and Repeat Actions, Lesson 26 Using a Rotary Encoder to Control a Robotic Arm. As an open source hardware product, we pay special attention to the secondary development potential of, . It is customized based on Debian GNU/Linux and can run on all versions of the Raspberry Pi motherboard. 1.You need to download an APP called "Fing" on your phone, as shown below: 2.After the download is complete, your phone and Raspberry Pi need to be in the same local area network, that is, your phone and Raspberry Pi are connected to the same WIFI, then open "Fing" and click "Scan for devices": 3.Wait for the scan to complete. If you want to build your own project, you can directly call the existing API to control RaspArm-Sat the code level, for this can greatly improve development efficiency.
, we use the inverse connection method to control the servo, which is different from the control method that depends on inputting the angle of the servo. Enter in the Raspberry Pi command line: sudo killall python3 (stop the automatic running program), 3. Is it against the law to sell Bitcoin at a flea market? When the Raspberry Pi starts, it will automatically find this ssh file. 1.6.3 Remotely logging in to the Raspberry Pi system. After entering the system interface, we move the mouse cursor to the ". " 1. (2) You need to insert the SD card into the card reader first, and then connect the card reader to the computer. The angleInput parameter is an array of four servo angles. 1. If you have any questions, just post to our forum at www.adeept.com/forum, or you can email our support team at support@adeept.com, usually, we will reply you within 24 hours. 3. It may cause an error when the Raspberry Pi runs the program. It also avoids frequent revision of the tutorial. (5) Double-click to open MobaXterm_Personal_20.2.exe to directly open the MobaXterm software. partners@ozrobotics.com (4) Open the unzipped folder, there is a file MobaXterm_Personal_20.2.exe.
 Press Enter to log in to the Raspberry Pi system.
Press Enter to log in to the Raspberry Pi system. And then the Raspberry Pi will start up and run. Site design / logo 2022 Stack Exchange Inc; user contributions licensed under CC BY-SA. Lesson 13 Controlling the Robotic Arm with a Web Application, Lesson 1 Installing and Logging in to the Raspberry Pi System, Lesson 2 Downloading and Installing the Relevant Code Program of the Robot, Lesson 3 Creating a WiFi Hotspot on Raspberry Pi, Lesson 4 Downloading and Installing Python, Lesson 5 Displaying Text on the OLED Screen, Lesson 6 Playing Animation on the OLED Screen, Lesson 9 Multithreading OLED Screen Control, Lesson 11 Remotely Control of Robotic Arm with GUI, Lesson 12 Controlling the Robotic Arm with Raspberry Pi Peripherals, Lesson 14 Replacing the Arm Clip with a Writing Pen, Lesson 16 Mounting the RaspArm-S Robotic Arm to Other Robots, Lesson 17 Using Multithreading to Control the Servo of RaspArm-S, Lesson 18 Introduction to the Soft Motion Method of the Servo, Lesson 19 Inverse Solution Function of Plane Link, Lesson 21 Simulating a Plane Link with Matplotlib, Lesson 22 Matplotlib Dual-view Linkage Simulation, Lesson 24 Using json Data to Record and Repeat Actions, Lesson 26 Using a Rotary Encoder to Control a Robotic Arm. First, you need to create a new .py file and place it in the same folder as raspArmS.py. Connect and share knowledge within a single location that is structured and easy to search. After entering the system interface, we move the mouse cursor to the "" in the upper right corner, then it will display the IP address of the Raspberry Pi: 192.168.3.157 (the IP address of each Raspberry Pi is different). 2. (4) Enter the IP address of the Raspberry Pi previously queried: 192.168.3.157, and confirm with "OK". After entering the Raspberry Pi official website page, click "Raspberry Pi OS (Legacy)" to jump to the corresponding location, or you can find the location of Raspberry Pi OS (Legacy) by sliding the page. Due to compatibility issues with the latest Raspberry Pi official image fileand the camera. There is no need to consider that how many degrees each joint rotates. From the beginning of getting the Raspberry Pi, everyone has to learn advanced knowledge and skills step by step, and understand how to use the Python language for rapid Maker hardware product development. Through the SSH service, you can remotely use the command line of the Raspberry Pi on another machine. Next, we will teach you how to download the Raspberry Pi OS Raspbian. adeept has online tutorial to run the robots and already written python files which we need to run in raspberry pi in order to make the robot run. Before assembling the servo rocker arm, it's recommended to power on the servo and control the servo shaft to rotate to the central position, so then the rocker arm installed at a specific angle will be in the center position(90). MobaXterm is a terminal tool software that can be used to remotely control the Raspberry Pi. The parameter axis is used to select the desired motion axis, which can be: X, Y, and Z. We recommend using the Raspberry Pi Imager tool officially provided by the Raspberry Pi. At the same time, this product provides 26supporting courses (the course will be followed by higher-level function updates). You need to write down this IP address. When the x value is 0, the end point of the robotic arm is the point directly in front of it, and the x value becomes larger, and the end point shifts to the right; the x value becomes smaller, the end point shifts to the left.